


產(chǎn)品分類
產(chǎn)品快速搜索
本月特惠產(chǎn)品
新聞中心
聯(lián)系我們
公司名稱:東莞萬興鴻自動(dòng)化有限公司
公司地址:東莞東城莞長路西2號(hào)


免費(fèi)客服熱線:
 (中國)
(中國)
 (臺(tái)灣)
(臺(tái)灣)
流量計(jì)時(shí)器:
產(chǎn)品技術(shù)應(yīng)用當(dāng)前位置: 網(wǎng)站首頁 > 新聞中心 > 產(chǎn)品技術(shù)應(yīng)用
PID調(diào)試步驟(附口訣)
發(fā)布時(shí)間:2018-01-26
沒有一種控制算法比PID調(diào)節(jié)規(guī)律更有效、更方便的了。現(xiàn)在一些時(shí)髦點(diǎn)的調(diào)節(jié)器基本源自PID。甚至可以這樣說:PID調(diào)節(jié)器是其它控制調(diào)節(jié)算法的嗎。
為什么PID應(yīng)用如此廣泛、又長久不衰?
因?yàn)镻ID解決了自動(dòng)控制理論所要解決的最基本問題,既系統(tǒng)的穩(wěn)定性、快速性和準(zhǔn)確性。調(diào)節(jié)PID的參數(shù),可實(shí)現(xiàn)在系統(tǒng)穩(wěn)定的前提下,兼顧系統(tǒng)的帶載能力
和抗擾能力,同時(shí),在PID調(diào)節(jié)器中引入積分項(xiàng),系統(tǒng)增加了一個(gè)零積點(diǎn),使之成為一階或一階以上的系統(tǒng),這樣系統(tǒng)階躍響應(yīng)的穩(wěn)態(tài)誤差就為零。
由于自動(dòng)控制系統(tǒng)被控對(duì)象的千差萬別,PID的參數(shù)也必須隨之變化,以滿足系統(tǒng)的性能要求。這就給使用者帶來相當(dāng)?shù)穆闊貏e是對(duì)初學(xué)者。下面簡單介紹一下調(diào)試PID參數(shù)的一般步驟:
1.負(fù)反饋
自動(dòng)控制理論也被稱為負(fù)反饋控制理論。首先檢查系統(tǒng)接線,確定系統(tǒng)的反饋為負(fù)反饋。例如電機(jī)調(diào)速系統(tǒng),輸入信號(hào)為正,要求電機(jī)正轉(zhuǎn)時(shí),反饋信號(hào)也為正(PID算法時(shí),誤差=輸入-反饋),同時(shí)電機(jī)轉(zhuǎn)速越高,反饋信號(hào)越大。其余系統(tǒng)同此方法。
2.PID調(diào)試一般原則
a.在輸出不振蕩時(shí),增大比例增益P。
b.在輸出不振蕩時(shí),減小積分時(shí)間常數(shù)Ti。
c.在輸出不振蕩時(shí),增大微分時(shí)間常數(shù)Td。
3.一般步驟
a.確定比例增益P
確定比例增益P
時(shí),首先去掉PID的積分項(xiàng)和微分項(xiàng),一般是令Ti=0、Td=0(具體見PID的參數(shù)設(shè)定說明),使PID為純比例調(diào)節(jié)。輸入設(shè)定為系統(tǒng)允許的最大值的
60%~70%,由0逐漸加大比例增益P,直至系統(tǒng)出現(xiàn)振蕩;再反過來,從此時(shí)的比例增益P逐漸減小,直至系統(tǒng)振蕩消失,記錄此時(shí)的比例增益P,設(shè)定
PID的比例增益P為當(dāng)前值的60%~70%。比例增益P調(diào)試完成。
b.確定積分時(shí)間常數(shù)Ti
比例增益P確定后,設(shè)定一個(gè)較大的積分時(shí)間常數(shù)Ti的初值,然后逐漸減小Ti,直至系統(tǒng)出現(xiàn)振蕩,之后在反過來,逐漸加大Ti,直至系統(tǒng)振蕩消失。記錄此時(shí)的Ti,設(shè)定PID的積分時(shí)間常數(shù)Ti為當(dāng)前值的150%~180%。積分時(shí)間常數(shù)Ti調(diào)試完成。
c.確定微分時(shí)間常數(shù)Td
微分時(shí)間常數(shù)Td一般不用設(shè)定,為0即可。若要設(shè)定,與確定 P和Ti的方法相同,取不振蕩時(shí)的30%。
d.系統(tǒng)空載、帶載聯(lián)調(diào),再對(duì)PID參數(shù)進(jìn)行微調(diào),直至滿足要求。
2.PID控制簡介
目前工業(yè)自動(dòng)化水平已成為衡量各行各業(yè)現(xiàn)代化水平的一個(gè)重要標(biāo)志。同時(shí),控制理論的發(fā)展也經(jīng)歷了古典控制理論、現(xiàn)代控制理論和智能控制理論三個(gè)階段。智能
控制的典型實(shí)例是模糊全自動(dòng)洗衣機(jī)等。自動(dòng)控制系統(tǒng)可分為開環(huán)控制系統(tǒng)和閉環(huán)控制系統(tǒng)。一個(gè)控制系統(tǒng)包括控制器﹑傳感器﹑變送器﹑執(zhí)行機(jī)構(gòu)﹑輸入輸出接
口。控制器的輸出經(jīng)過輸出接口﹑執(zhí)行機(jī)構(gòu)﹐加到被控系統(tǒng)上﹔控制系統(tǒng)的被控量﹐經(jīng)過傳感器﹐變送器﹐通過輸入接口送到控制器。不同的控制系統(tǒng)﹐其傳感器﹑
變送器﹑執(zhí)行機(jī)構(gòu)是不一樣的。比如壓力控制系統(tǒng)要采用壓力傳感器。電加熱控制系統(tǒng)的傳感器是溫度傳感器。目前,PID控制及其控制器或智能PID控制器
(儀表)已經(jīng)很多,產(chǎn)品已在工程實(shí)際中得到了廣泛的應(yīng)用,有各種各樣的PID控制器產(chǎn)品,各大公司均開發(fā)了具有PID參數(shù)自整定功能的智能調(diào)節(jié)器
(intelligent
regulator),其中PID控制器參數(shù)的自動(dòng)調(diào)整是通過智能化調(diào)整或自校正、自適應(yīng)算法來實(shí)現(xiàn)。有利用PID控制實(shí)現(xiàn)的壓力、溫度、流量、液位控制
器,能實(shí)現(xiàn)PID控制功能的可編程控制器(PLC),還有可實(shí)現(xiàn)PID控制的PC系統(tǒng)等等。 可編程控制器(PLC)
是利用其閉環(huán)控制模塊來實(shí)現(xiàn)PID控制,而可編程控制器(PLC)可以直接與ControlNet相連,如Rockwell的PLC-5等。還有可以實(shí)現(xiàn)
PID控制功能的控制器,如Rockwell 的Logix產(chǎn)品系列,它可以直接與ControlNet相連,利用網(wǎng)絡(luò)來實(shí)現(xiàn)其遠(yuǎn)程控制功能。
(1)開環(huán)控制系統(tǒng)
開環(huán)控制系統(tǒng)(open-loop control system)是指被控對(duì)象的輸出(被控制量)對(duì)控制器(controller)的輸出沒有影響。在這種控制系統(tǒng)中,不依賴將被控量反送回來以形成任何閉環(huán)回路。
(2)閉環(huán)控制系統(tǒng)
閉環(huán)控制系統(tǒng)(closed-loop control
system)的特點(diǎn)是系統(tǒng)被控對(duì)象的輸出(被控制量)會(huì)反送回來影響控制器的輸出,形成一個(gè)或多個(gè)閉環(huán)。閉環(huán)控制系統(tǒng)有正反饋和負(fù)反饋,若反饋信號(hào)與系
統(tǒng)給定值信號(hào)相反,則稱為負(fù)反饋( Negative
Feedback),若極性相同,則稱為正反饋,一般閉環(huán)控制系統(tǒng)均采用負(fù)反饋,又稱負(fù)反饋控制系統(tǒng)。閉環(huán)控制系統(tǒng)的例子很多。比如人就是一個(gè)具有負(fù)反饋
的閉環(huán)控制系統(tǒng),眼睛便是傳感器,充當(dāng)反饋,人體系統(tǒng)能通過不斷的修正最后作出各種正確的動(dòng)作。如果沒有眼睛,就沒有了反饋回路,也就成了一個(gè)開環(huán)控制系
統(tǒng)。另例,當(dāng)一臺(tái)真正的全自動(dòng)洗衣機(jī)具有能連續(xù)檢查衣物是否洗凈,并在洗凈之后能自動(dòng)切斷電源,它就是一個(gè)閉環(huán)控制系統(tǒng)。
(3)階躍響應(yīng)
階躍響應(yīng)是指將一個(gè)階躍輸入(step
function)加到系統(tǒng)上時(shí),系統(tǒng)的輸出。穩(wěn)態(tài)誤差是指系統(tǒng)的響應(yīng)進(jìn)入穩(wěn)態(tài)后﹐系統(tǒng)的期望輸出與實(shí)際輸出之差。控制系統(tǒng)的性能可以用穩(wěn)、準(zhǔn)、快三個(gè)字
來描述。穩(wěn)是指系統(tǒng)的穩(wěn)定性(stability),一個(gè)系統(tǒng)要能正常工作,首先必須是穩(wěn)定的,從階躍響應(yīng)上看應(yīng)該是收斂的﹔準(zhǔn)是指控制系統(tǒng)的準(zhǔn)確性、控
制精度,通常用穩(wěn)態(tài)誤差來(Steady-state
error)描述,它表示系統(tǒng)輸出穩(wěn)態(tài)值與期望值之差﹔快是指控制系統(tǒng)響應(yīng)的快速性,通常用上升時(shí)間來定量描述。
(4)PID控制的原理和特點(diǎn)
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今已有近70年歷史,它以
其結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對(duì)象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時(shí),控制理論的其
它技術(shù)難以采用時(shí),系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場(chǎng)調(diào)試來確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便。即當(dāng)我們不完全了解一個(gè)系統(tǒng)和被控對(duì)象﹐或不
能通過有效的測(cè)量手段來獲得系統(tǒng)參數(shù)時(shí),最適合用PID控制技術(shù)。PID控制,實(shí)際中也有PI和PD控制。PID控制器就是根據(jù)系統(tǒng)的誤差,利用比例、積
分、微分計(jì)算出控制量進(jìn)行控制的。
比例(P)控制
比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或
簡稱有差系統(tǒng)(System with Steady-state
Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積
分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無穩(wěn)
態(tài)誤差。
微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。
自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,
其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。這就是說,在控制器中僅引入
“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì),這樣,具有比例+微分的控制器,就能
夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在
調(diào)節(jié)過程中的動(dòng)態(tài)特性。
(5)PID控制器的參數(shù)整定
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)
整定的方法很多,概括起來有兩大類:一是理論計(jì)算整定法。它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直
接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改。二是工程整定方法,它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡單、易于掌握,在工程實(shí)際中被廣
泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控
制器參數(shù)進(jìn)行整定。但無論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行
PID控制器參數(shù)的整定步驟如下:(1)首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作﹔(2)僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,
記下這時(shí)的比例放大系數(shù)和臨界振蕩周期﹔(3)在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
3、PID控制器參數(shù)的工程整定,各種調(diào)節(jié)系統(tǒng)中PID參數(shù)經(jīng)驗(yàn)數(shù)據(jù)以下可參照:
溫度T: P=20~60%,T=180~600s,D=3-180s
壓力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
4. PID常用口訣:
參數(shù)整定找最佳,從小到大順序查
先是比例后積分,最后再把微分加
曲線振蕩很頻繁,比例度盤要放大
曲線漂浮繞大灣,比例度盤往小扳
曲線偏離回復(fù)慢,積分時(shí)間往下降
曲線波動(dòng)周期長,積分時(shí)間再加長
曲線振蕩頻率快,先把微分降下來
動(dòng)差大來波動(dòng)慢。微分時(shí)間應(yīng)加長
理想曲線兩個(gè)波,前高后低4比1
一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會(huì)低

S-S系列智能可控硅

P900X-AA系列溫控表

M900-701A高性能控制器
MG900AI智能型溫控器

HCA系列固態(tài)調(diào)壓器

MGR1三合一體機(jī)

H3000系列
P900X-701B系列
P900X-701C系列

MG900-701、701B系列
?MG900R雙輸出專用型溫控器
MG900AL硅鉬棒負(fù)載專用
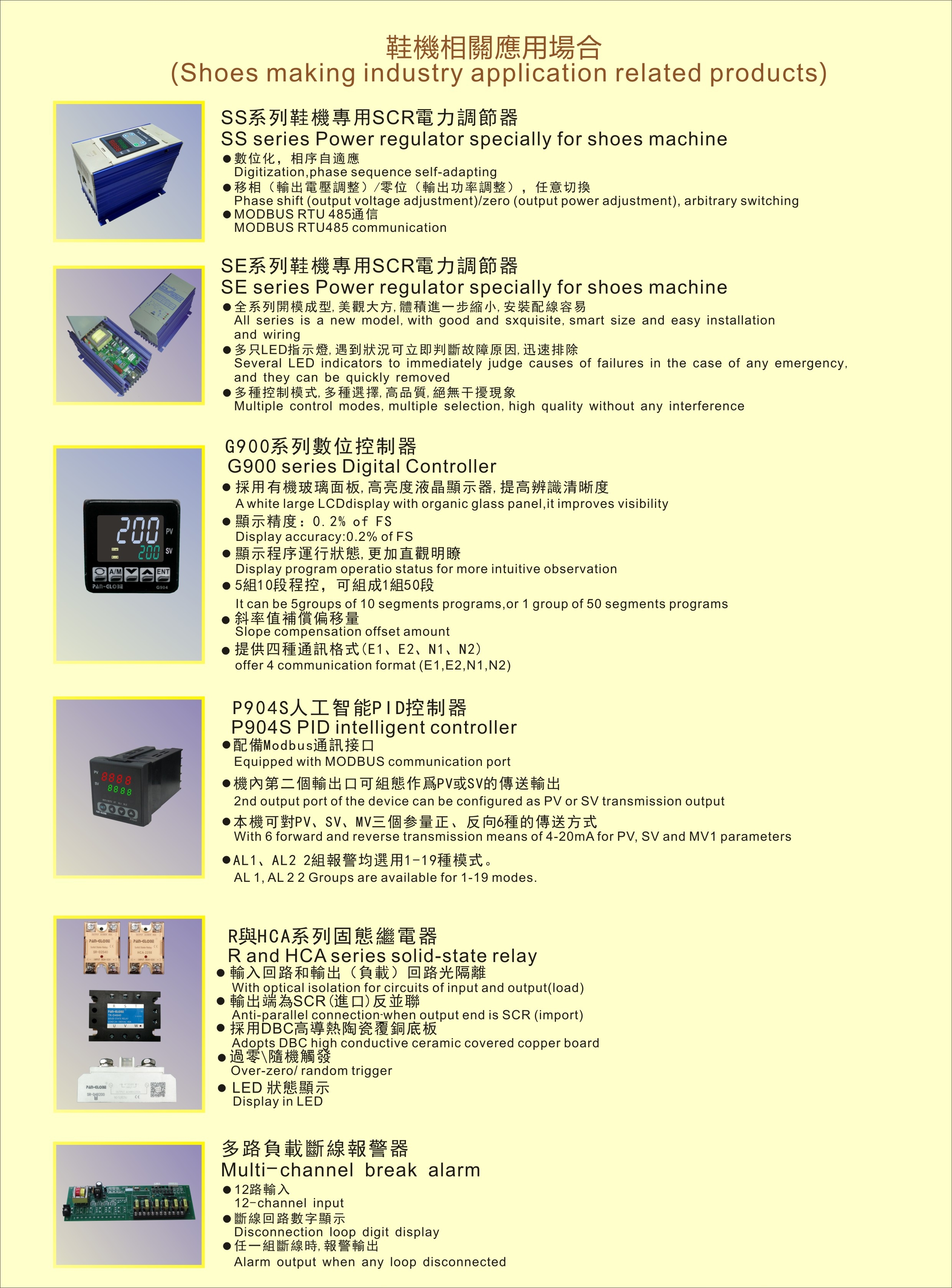
pan-globe產(chǎn)品應(yīng)用彩頁

MG900AA通用型溫控器

M2000軌道型控制模塊

恒定溫度控制系統(tǒng)中的應(yīng)用

高溫試驗(yàn)爐行業(yè)上的應(yīng)用

S-TYPE智能調(diào)功器在推板窯及回轉(zhuǎn)窯行業(yè)的應(yīng)用

退火爐改造溫控系統(tǒng)應(yīng)用

導(dǎo)軌式溫度控制器應(yīng)用于燒結(jié)爐溫度控制系統(tǒng)

M5000系列熱流道專用溫度控制器
MG900AX溫度控制器

M900系列高性能控制器

S-L系列智能可控硅

RC-2000系列控制器(R2000系列停產(chǎn),改M2000系列)

P900X系列溫控表

K900系列通用型微電腦控制器

T900系列精簡型微電腦控制器

T系列撥盤式微電腦控制器

E5CWT系列微電腦控制器

TH900系列溫濕度控制器

CET系列冷凍冷藏機(jī)專用控制器

EG系列光柱型壓力/液位控制器

智能電量表PA9200

DA-17系列

DA-18系列

DA-25系列

DA-30系列

DA-40系列

DE-18系列
DM-1204系列

DM-1805系列

DM-1808系列
TM-0802系列
TM-0801系列

TM-1202系列

TM-1204系列

TM-1805系列

TM-1808系列

TM-3010系列

TM-3015系列

DF-XX FREE POWER光電系列

輥道窯工程案例

P900F系列高性能控制器

E系列SCR電力控制器

CR系列多功能計(jì)數(shù)器/長度計(jì)

TR多功能計(jì)時(shí)器

P系列SCR電力控制器

通訊/多回路通訊用避雷器

信號(hào)/電源避雷器
編碼器
壓力變送器

液位傳感器
流量傳感器
漏液檢知器

PE300風(fēng)管型LCD溫/濕度傳送器

PE1000壁掛式溫、濕度傳送器
CT-S紅外線溫度傳感器
R-S2000轉(zhuǎn)換器

E4T系列多功能信號(hào)轉(zhuǎn)換器

D系列單相固態(tài)繼電器

TK-701點(diǎn)火器

FR系列多功能頻率/轉(zhuǎn)速/線速表

監(jiān)控系統(tǒng)應(yīng)用場(chǎng)合

DA-1204 DA-1204S系列

DX-XX光電系列

DU-XX光電系列

MDR-XX短型光電系列
DR-XX圓管光電系列

DS-XX小型光電系列之二

DS-XX小型光電系列之一

TR-XX銅管光電系列

FA系列多功能位置表

大字幕顯示器

DPM6系列智能顯示儀表

HR系列撥盤設(shè)定時(shí)間繼電器

DS系列四位半數(shù)字電流電壓表

CM系列電流監(jiān)控器

DR系列三位半數(shù)電流電壓表
熱電偶

CB系列預(yù)置撥碼計(jì)數(shù)器

電線、電纜設(shè)備應(yīng)用場(chǎng)合

醫(yī)藥設(shè)備、簡易控制應(yīng)用場(chǎng)合

熱處理、冶金、退火、涂裝、食品加工設(shè)備應(yīng)用場(chǎng)合

窯爐、燃?xì)狻⒓訜帷⒂∪尽⒓徔棥⒑娓伞⑺幚響?yīng)用場(chǎng)合

鞋機(jī)相關(guān)應(yīng)用場(chǎng)合

無塵室、種植場(chǎng)、樓宇溫度應(yīng)用場(chǎng)合

橡塑膠設(shè)備應(yīng)用場(chǎng)合
友情鏈接